文/赵明,郝小燕,蒋秀蓉 (北方自动控制技术研究所,太原 030006)
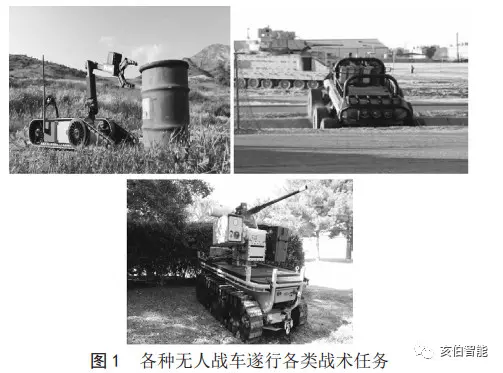
无人战车遥控数据链技术是指对无人战车进行信息回传和操作控制的一种数据链控制与组网技术,这里的信息回传是指对无人战车上的各种传感器采集到的实时视频、图像、位置等信息的态势回传;操作控制是指后方操控系统对无人战车驾驶行进状态和火指控设备的操作与控制,遥控数据链系统功能、性能的好坏直接决定了整个无人战车系统的作用和能力。遥控数据链由数据链战术电台和操控系统组成,数据链战术电台是指数据无线传输设备,操控系统一般以软件的形式安装到有人战车或地面控制站和无人战车的计算机中。 无人车遥控数据链主要完成实时性较强的遥控信息(视频 / 数据)的传输与处理,实现有人战车和无人战车的协同,提高联合打击能力,如图1所示。按使用属性和作战任务,又可以分为情报侦察遥控数据链、火力打击遥控数据链、边界巡逻遥控数据链等。
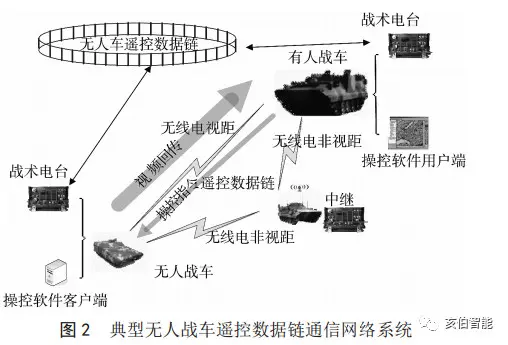
无人车遥控数据链的作用距离、数据传输速率和抗干扰能力是遥控数据链最主要的技术指标。作用距离既决定了无人战车的活动半径,又是影响系统规模的最主要因素。按照作用距离分档,分别有近程、短程、中程和远程无人战车数据链。战术电台之间必须满足无线电通视条件,不具备无线电通视条件时则要采用中继方式,因此,有视距操控数据链、地面中继操控数据链、空中中继操控数据链和卫星中继操控数据链,此外有一站多车数据链。无人战车数据链的使用环境相对恶劣,要求数据链有良好的电磁兼容性、低的截获概率、高的安全性和足够的抗干扰能力保证在战场条件下可靠地工作。 遥控数据链中的操控系统软件用于实现路径规划、链路控制、 运动控制、火力控制、航迹显示、参数显示和图像显示,以及记录和分发等功能。战术电台组网多采用点对点的方式,由于无人战车遥控数据链的上下行信道数据传输能力明显不对称(信息回传的下行信道的数据速率远高于传输遥控指令的上行信道),所以遥控数据链战术电台的信道带宽往往也设计成不对称性。遥控数据链主要以 “人 - 车” , “人 - 车 - 车” 和“车 - 车” 3 种方式工作,即第 1 种采用人远程遥控无人战车实现各种作战任务;第 2 种采用人提前给定无人车预定作战任务,由无人车按照任务部署完成行动;第 3 种采用直接由无人车和无人车之间进行协同遥控功能完成作战任务。通过遥控数据链的信息传输和处理,充分发挥了无人战车的各种作战效能,实现了链路平台的自动化、 一体化。图 2 是典型无人战车遥控数据链通信网络系统。
目前世界上研制生产无人战车系统的国家至少有 20 多个,其中美国和以色列处于领先地位。美国是世界上生产无人战车系统品种最多、 使用最广泛的国家,在发展无人战车系统方面占主导位。以色列则是世界上小型短程无人战车系统方面技术最先进、 使用最有经验的国家。 对国外无人战车发展情况的介绍、 综述、 分析的文章较多,但其中有关无人战车遥控数据链技术的内容较少,有的也只是作为配套设备的简单说明,缺少系统地介绍和分析。根据现已掌握的资料分析,以美国和以色列为代表的国外无人战车遥控。数据链技术的现状可以归纳成以下几方面。 在数据链的工作频段方面,为了适应数据传输能力和系统兼容能力增高的需求,除少数低成本、近距离或备用系统仍采用较低的 VHF、 UHF、 L、 S 波段外,已大都采用较高的 C、 X、 Ku 波段。 在数据链抗干扰技术方面,已普遍采用卷积、RS、 交织等抗干扰编码,以及直接序列扩频技术和高速跳频技术。上行窄带遥控信道的直接序列扩频处理增益达到 33 dB,最高信息速率达到 2Mb/s (美国的公司)[ 1]。目前已有在 5 Mb/s 左右的无人战车下行数据链实现直接序列扩频的报道,也有在宽带数据链路中采用正交频分或正交码分复用扩频技术的相关应用研究成果,这种扩频技术有很强的抗干扰能力,能适应恶劣的多径环境,但尚未见到在无人战车下行宽带信道采用这种扩频技术的有关报道。 在无人战车超视距中继技术方面,已实现了空中中继和卫星中继。国外无人战车经过空中中继作用距离扩展到 100 km 左右。美国无人战车使用 Ku波段和 UHF 波段的卫星中继数据链,Ku 波段地面天线口径分别为 5.5 m 和 6.25 m,无人车车载天线口径分别为 0.76 m 和 1.22 m,上行遥控数据速率可达 200 kb/s,下行图像 / 视频数据速率分别为1.544 Mb/s 和 50 Mb/s,作用距离 500 km 以上[ 2]。
研究无人战车遥控数据链总体技术主要是抓住其关键技术,只有突破了真正关键技术而不是一大堆工作量式的工程,才能促使技术的发展与进步。下面梳理了 6 条关键技术进行总结。
设计的遥控数据链波形应包含上下行的宽带 /窄带模式,宽带模式提供无人战车向控制中心回传的视频图像信息,提供高带宽的业务承载能力,窄带模式不要求很高的传输速率,但要具有较强的干扰能力和苛刻的实时性保证,用于遥控数据链控制中心向无人战车发送遥控控制指令。两种模式在物理层和 MAC 层独立设计,在 MAC 层以上采用相同的功能实体进行融合。协议体系的控制面和业务面分离,遥控数据链波形控制面在无线链路层进行自适应处理,上层采用统一的控制面功能实体进行处理,对用户透明。业务面上,通过分组网关接入网络。技术体系架构如图 3 所示。
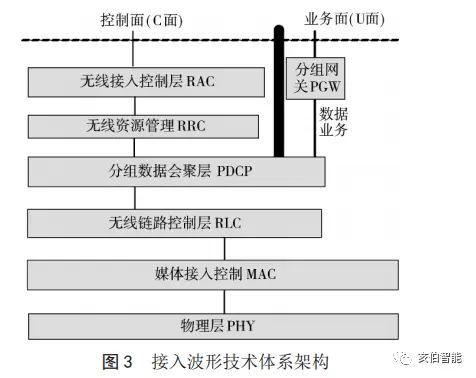
在控制面,RAC 层主要完成无人战车终端用户的接入控制,以及空中接口到网络侧 IP 接口的转换,包含节点管理、 无线资源管理、 IP 地址池管理、移动性管理、 用户数据管理、 接入网关、 分组数据控制、 单站模式下短消息、 单呼、 组呼等功能实体;RRC层主要完成无线资源管理、终端无线连接状态管理;PDCP 层主要完成业务 / 控制数据传输、压缩及完整性保护功能;RLC 则提供数据传输链路控制功能,MAC 层完成逻辑信道到传输信道的映射、传输优先级管理、链路层数据的传输等功能,PHY 层则负责空口数据的收发。在业务面,数据业务通过分组网关 PGW 接入网络,窄带模式下的话音业务则直接从 MAC 层通过话音网关接入网络。
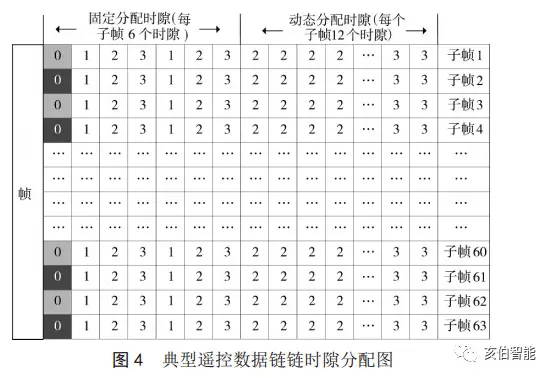
无人车遥控数据链一般采用 “点 - 点” 的组网模式,即后方一辆指挥控制车或控制中心,操控一辆无人车,这样的组网模式对于通信资源时隙的划分相对简单,可按照需求进行固定划分即可。随着计算机处理技术,移动无线宽带技术的发展,提出了 “一对多” 的无人车遥控数据链技术,即后方只存在一辆控制车 / 控制中心,可以控制前方多辆无人战车的模式。这样的时隙划分可采用 “固定 + 动态” 的时隙分配策略完成。如图 4 所示 1 表示此时隙分配给后方指挥控制车,2、 3 表示此时隙分别分配给 2 辆无人战车,其中遥控数据链操控指令采用固定分配时隙(前 6 个时隙),保证操控信息的实时性,而回传视频图像信息采用预留竞争时隙(后面 12 个时隙),最大程度提高信道的利用率和吞吐量,图 4 是遥控数据链的时隙分配表,可以看出固定时隙为 1~6,6~32 采用预约竞争分配时隙,每个时隙 1.2 ms。
抗干扰能力是无人战车测控系统性能的重要指标。一般常采用基于 DSSS 扩频技术,同时具备选频功能,在复杂电磁环境下,具备隐蔽通信和抗干扰能力。 采用基于前馈功放的频率捷变载波聚合技术进行设计。此时,控制中心通过搜索多个载波的同步信道发现并驻留在可用载波上。系统决定其中一个载波为无人车使用的主载波,其他驻留载波为辅载波。控制中心仅使用主载波进行通信。当干扰发生时,控制中心检测出的可用频点中选择使用一个未受干扰的频点,使用频率捷变技术实现快速频点切换,在所有频点均被干扰的情况下,使用载波内子载波干扰剔除技术来增强抗干扰能力。 根据消息的重要程度,采用超长序列进行扩频,大幅度降低信号的功率;同时结合自动功率控制机制,将发射的功率进一步压低,保证信号在低于背景噪声的情况下仍然能够工作,降低被检测的概率。采用跳码的方式以增强扩频码的随机性,从而增加抗截获性能。
根据战术部队各分队作战应用对通信网络的不同需求,遥控数据链采用在同一硬件平台上加载不同波形实现窄带波形和宽带波形同时传输功能,需要对多波形统一加载涉及的软件无线电多波形软件 / 硬件规范、 轻量化平台、 多波形宽频段覆盖硬件小型化和功放适应性能等技术进行研究。
制定完备、可行的软件通信体系结构标准规范。规范战术电台架构、 软硬件平台和宽带波形组件设计规范,实现电台具备通用化、 软件可升级、 波形可更换的目标。
针对小型化、 多形态的无人车的特点,需研究轻量化的软件无线电软件平台:包括轻量化的核心框架和轻量化组件技术,支持资源受限平台下波形组件的高效部署和运行。采用优化和裁剪相结合的方式设计满足背负台的软件架构体系。
为满足小型化、 宽覆盖频段、 信道带宽可变,适应多种模式的要求,有必要开展小型宽带配置射频设计。
1)实现信道带宽可灵活配置,要求带宽可变换,提高整机数据传输速率适应性,能够适应不同业务下传输数据量需求;
2)提高功放的效率和线性度。功放线性度和效率设计是设备小型化的难点之一。该技术提升多种调制方式和不同带宽下的电路匹配性能和功放效率。
遥控数据链的信息处理主要包括以下几个方面:
1)控制信息,主要是控制终端对无人装备进行行为控制的指令信息的处理与实时传输;
2)位置信息、 时间信息的处理,主要是根据系统对位置和时间精度的要求进行处理等;
3)受控无人装备的运行状态信息的处理,装备在受控执行任务的过程中需要实时反馈当前工作状态,使得控制人员了解装备的运行情况,从而进行下一步指挥控制;
4)协同信息的传输分发,主要是侦察信息的实时按需发送和作战协同信息的传输等。
建立对上述信息的处理数学模型和工程模型,分析信息源的种类、 数量、 每个信息源产生信息的单位时间量,构建并管理强实时、 大容量、 高速通信网络,从而明确信息处理的方法并进行验证,满足进行无人装备遥控对信息的时间、 精度、 延迟等方面的需求。
遥控数据链信息的分发与信道带宽、 信息时隙宽度、信息受体的可接收程度等方面密切相关,需要研究一种新的按需、 按要求进行自适应分发的互动协调式分发机制,以满足协同信息分发的需要。
无人战车遥控数据链有上下行信道,又要考虑多机多系统兼容工作和必要时的中继转发,再加上由于安装空间的限制,因此,多信道多点频收发的电磁兼容问题十分突出。要根据这些特点,在频段选择和频道设计上周密考虑,并采取必要的滤波和隔离措施。
无人战车遥控数据链是无人战车系统的重要组成部分,为无人战车与有人战车 / 控制中心、地面通信中继点之间提供无缝的数据通信连接,保障有人战车对无人战车的控制信息,无人战车对有人战车的反馈信息、位置信息、行驶状态信息,以及火力单元信息的实时安全传递,满足无人战车遂行高实时可靠的战术任务需求,同时可以看出未来无人战车遥控数据链的发展趋向于智能化、多用途、低功耗、自主协同等方面发展[ 3],随之带来的无人战车遥控数据链方面要向宽带化、 标准化、 更强抗干扰能力方向和互联互通互操作方向发展。
参考文献:
[ 1]于金华.国外战场数据链发展综述[ J].无线电通信技术,2001,21 ( 5):33- 37.
[ 2]张明德.现代战场 C3I 的神经网络 - 战术数据链[ J].尖端科技,2002,10 ( 9):18- 21.
[ 3]马春燕.对网络中心战的深化[ J].现代军事,2002,19 ( 2):39- 42.
[ 4] HAYKIN S.现代无线通信[ M].郑宝玉,译.北京:电子工业出版社,2006.
[ 5]张冬辰,周吉.军事通信[ M].北京:国防工业出版社,2008.
[ 6]梅文华,蔡善法.JTIDS/Link16 数据链[ M].北京:国防工业出版社,2007.

COPYRIGHT © 2021-2024上海亥伯智能科技有限公司 沪ICP备2021023490号-2